GNSS seurantajärjestelmä
Yleistä tietoa GPS ja GLONASS seurantajäjestelmästä
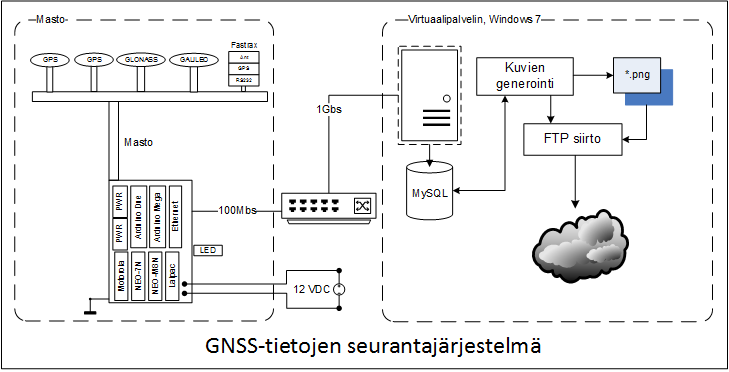
- Koostuu neljästä erilaisesta GNSS vastaanottimesta
- Motorola, Laipac ja Fastrax seuraavat GPS satelliitteja, u-blox NEO-7N seuraa ainoastaan GLONASS satelliitteja ja u-blox NEO M8N vain GALILEO satelliitteja
- Antennit ja Fastrax moduuli mastossa n. 6 m korkeudessa maanpinnasta
- Vastaanottimet yhdistetty Arduino Mega ja Due mikrokontrollereiden sarjaportteihin
- Molemmissa Arduinoissa Ethernet Shield
- Arduino lähettää vastaanotetut NMEA sanomat (vain GGA, GSA ja GSV) lähiverkkoon UDP-sanomina. Aikaisempi langaton XRF-yhteys on korvattu kiinteällä Ethernet yhteydellä (toimintavarmempi)
- Virtuaalipalvelimessa (Windows 7) palvelu, joka lukee ja käsittelee lähiverkosta tulevat UDP sanomat. Kerran minuutissa tallennetaan MySQL tietokantaan (1.7.2013 alkaen keskiarvo kaikista viimeisen minuutin minuutin sanomista, sitä ennen minuutin viimeinen sanoma). NMEA sanomien väli on 1 sec. Sanomia tallennetaan tunnissa siis 60 kpl yhtä vastaanotinta kohden. Kaikki virheettömät (CRC ok) sanomat käsitellään ja ne vaikuttavat minuutin keskiarvoon
- Kuvat piirretään MySQL tietokannassa olevista arvoista. Tämä erillinen ohjelma pyörii myös palveluna samassa virtuaalikoneessa ja päivittää kuvat 10 min välein.
- Kuvien päivityksen jälkeen ko. ohjelma lähettää tiedon FTP siirto-ohjelmalle, joka siirtää tiedostot omalle nettipalvelimelle sekä internettiin
- Kaikki ohjelmistot ovat omaa tuotantoa
- Kaksi aikaisempaa fyysistä Mini-ITX konetta on korvattu yhdellä tehokkaalla Windows Hyper-V Server 2012 R2 palvelimella pyörivällä virtuaalikoneella
| System | GNSS | Channels | Serial speed | Year |
| Motorola Oncore | GPS | 8 | 4800 | 2000 |
| Laipac PG-31 | GPS | 12 | 4800 | 2005 |
| Fastrax UP501 | GPS + SBAS | 66 | 9600 | 2010 |
| u-blox NEO-7N | GLONASS | 56 | 9600 | 2013 |
| u-blox NEO-M8N | GALILEO | 72 | 9600 | 2017 |
Seurattavat tiedot
Muutamia parametreja seurataan lähinnä oman mielenkiinnon vuoksi. GNSS sijaintitiedon (Lat/Long) virhettä seurataan vertaamalla laskettua sijaintia ja korkeutta tunnettuihin arvoihin. Seurattavat parametrit ovat:
- GNSS tarkkuus (2 dRMS accuracy)
- GNSS sijaintivirhe (Hor/Vert error)
- Dilution of Precision: PDOP, HDOP ja VDOP
- Satelliittien lukumäärä, näkyvät ja seurattavat